CAN 2.0B / CAN FD


使用 CAN_H 訊號解碼畫面 (邏輯分析儀)
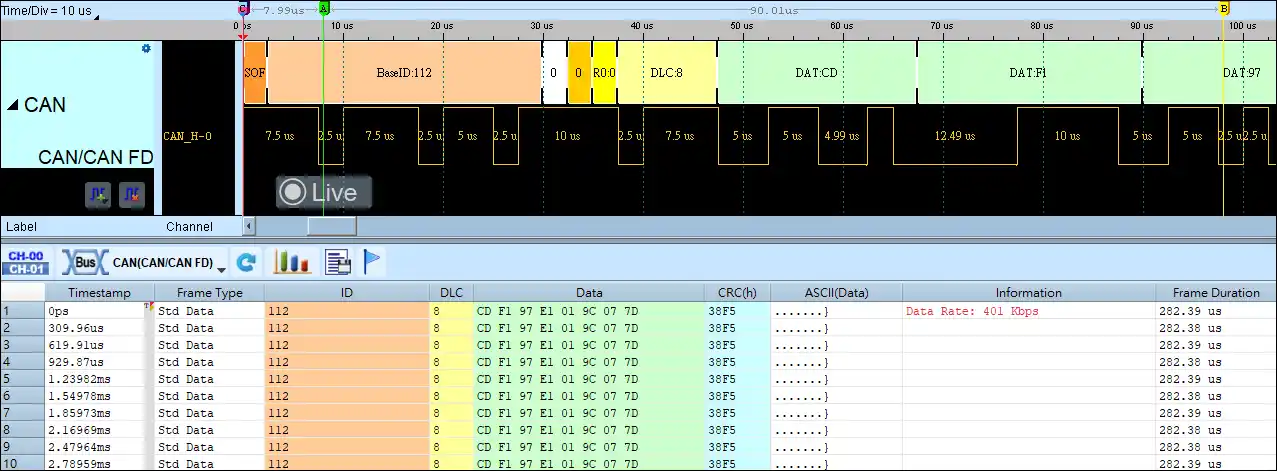
匯出為 TXT/CSV
在邏輯分析儀模式下,點擊報告區上方的圖示,可將解碼資料匯出為 TXT/CSV 檔案。


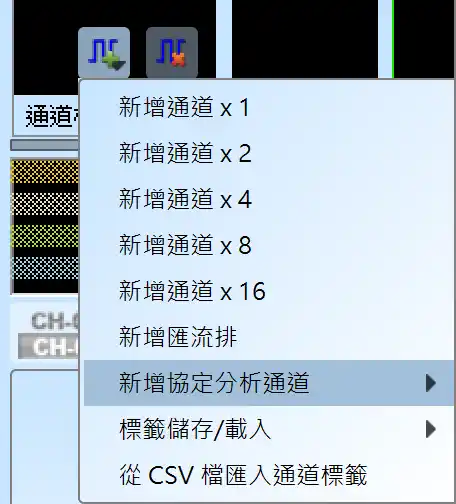
設定 CAN 2.0B / CAN FD 解碼 步驟說明
1. 點擊 快速設定 或 新增協定分析通道 可建立所需的通道與相關設定。
2. 選擇 CAN 進行解碼。
3. 若使用 快速設定,系統會提供 觸發條件、取樣率、觸發準位 及 通道設定方式 的建議設定值。
4. 點擊圖示以進入 解碼設定 畫面。


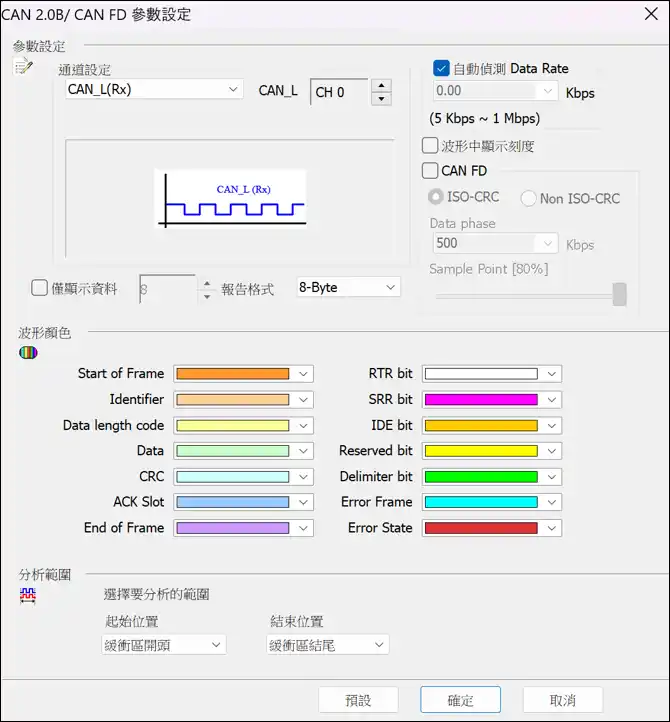
解碼設定
通道設定:
Differential:實體層訊號量測,訊號來自堆疊示波器,量測 CAN 訊號 CAN_H/L,可設定的 DSO 通道範圍為 1-6。
CAN_H:可直接量測穩定的實體層。
CAN_L (RX):可直接量測穩定的實體層,或經由收發器 (Transceiver) 轉換過後的邏輯訊號。
Tx:經由收發器 (Transceiver) 轉換過後的 Tx 或 Rx 邏輯訊號。
自動偵測 Data Rate:
打勾時,由程式協助計算 Data Rate。若未打勾,使用者可以選擇內建的 Data Rate 設定,或自行輸入 Data Rate。允許的 Data Rate 範圍為 5 Kbps 至 1 Mbps。若開啟 CAN FD 功能,因 Data Rate 會變動,此功能將會自動關閉。
波形中顯示刻度:
在波形上顯示刻度。若開啟 CAN FD 功能後,因 Data Rate 會變動,此功能將會自動關閉。
CAN 2.0B / CAN FD 分析範例波形檔