CAN 2.0B / CAN FD


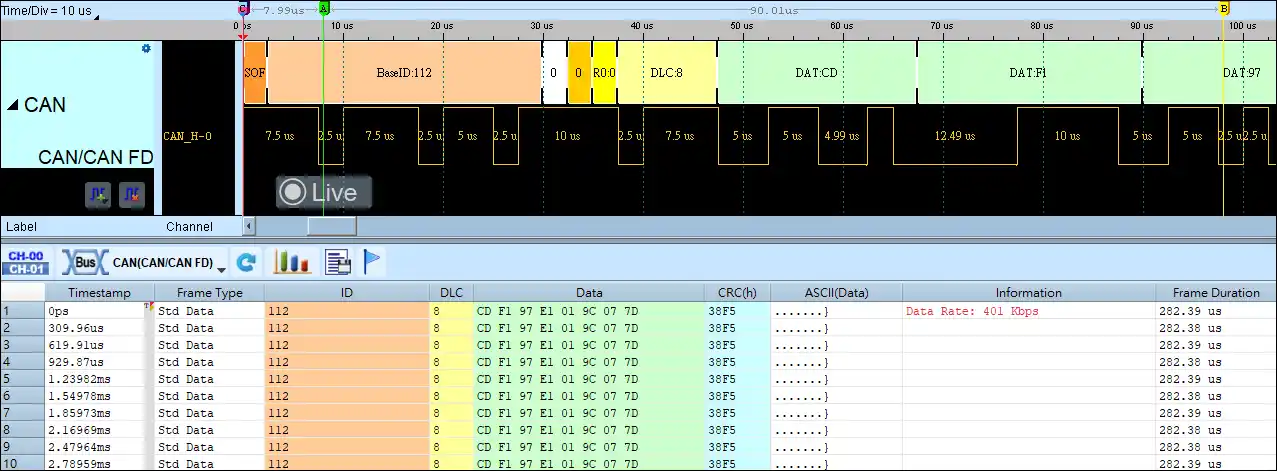
使用 CAN_H 信号解码界面(逻辑分析仪)
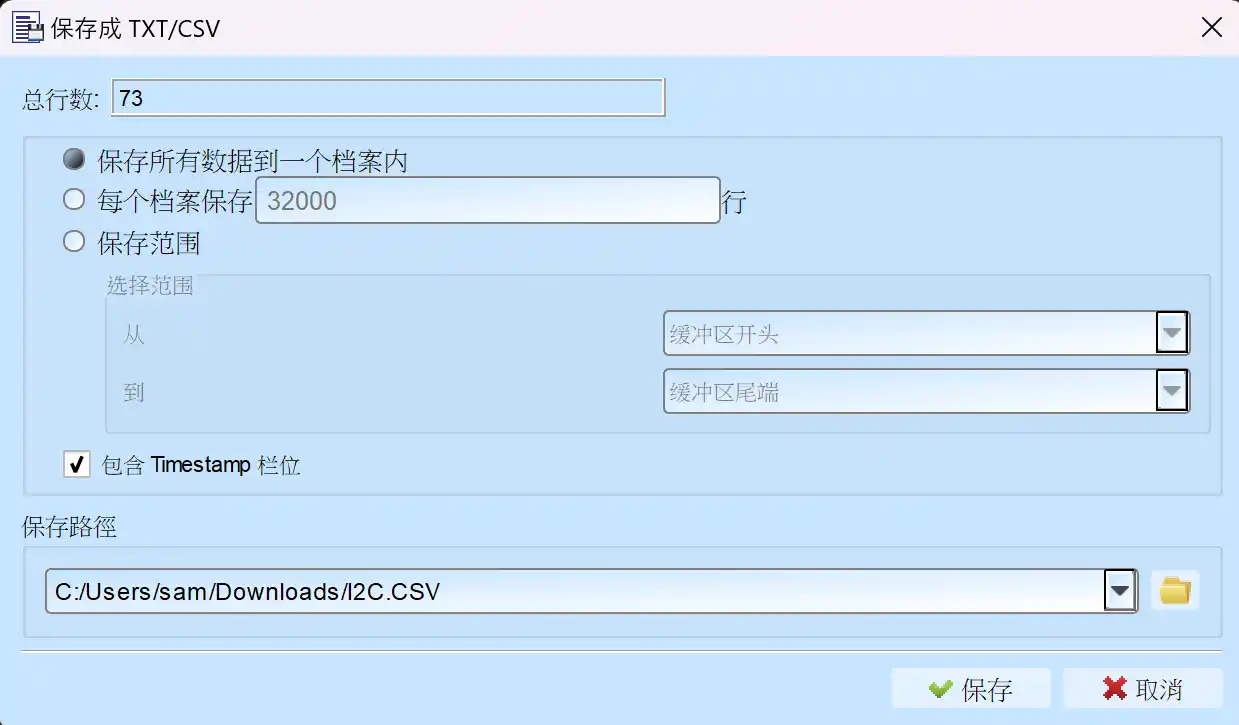
保存成 TXT/CSV
在逻辑分析仪模式下,点击报告区上方的图示,可将解码资料保存成 TXT/CSV 档案。

设置 CAN 2.0B / CAN FD 解码 步骤说明
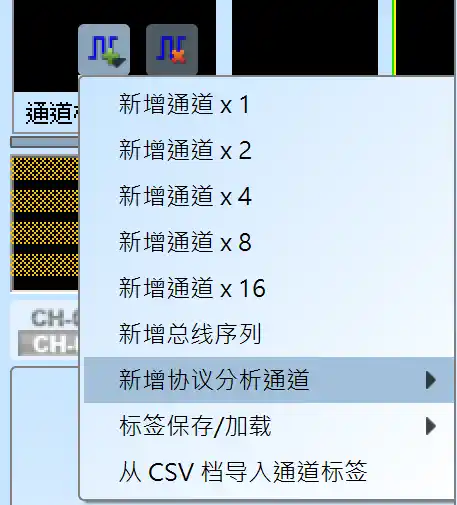
1. 点击 快速设置 或 新增协议分析通道 来创建所需的通道及相关设置。
2. 选择 CAN 进行解码。
3. 如果使用 快速设置,系统会提供 触发条件、采样率、门限电平 及 通道设置方式 的建议值。
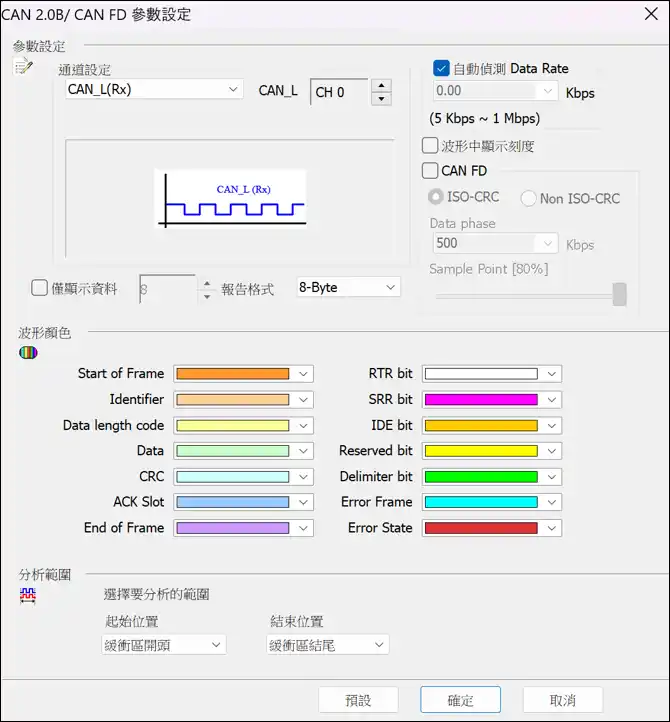
4. 点击齿轮图标进入 解码设置 页面。

解码设置
通道设置:
Differential:物理层信号测量,信号来自堆叠示波器,测量 CAN 信号 CAN_H/L,可设置的 DSO 通道范围为 1-6。
CAN_H:可直接测量稳定的物理层。
CAN_L (RX):可直接测量稳定的物理层,或经由收发器 (Transceiver) 转换后的逻辑信号。
Tx:经由收发器 (Transceiver) 转换后的 Tx 或 Rx 逻辑信号。
自动检测 Data Rate:
勾选时,由程序协助计算 Data Rate。若未勾选,用户可以选择内建的 Data Rate 设置,或自行输入 Data Rate。允许的 Data Rate 范围为 5 Kbps 至 1 Mbps。若启用 CAN FD 功能,由于 Data Rate 会变动,此功能将会自动关闭。
波形中显示刻度:
在波形上显示刻度。若启用 CAN FD 功能后,由于 Data Rate 会变动,此功能将会自动关闭。
CAN 2.0B / CAN FD 分析范例波形档